
Actualmente, los aviones verdaderamente furtivos tienen retornos de RCS del orden de centésimas de metro cuadrado. Para hacernos una idea, los aviones de 4a gen en servicio tienen retornos de entre un metro y cuatro metros cuadrados aproximadamente. Pero como eso son conceptos matemáticos difíciles de entender, los medios hacen la analogía del “retorno equivalente al de una abeja”.
Si bien, técnicamente, la equivalencia podría ser válida, muchos aficionados creen que si un radar “detecta” una “abeja” a la velocidad de un caza, no le será muy difícil identificar a esa “abeja” como un caza furtivo y así anular esa supuesta furtividad.
Quien afirma eso suele ser gente que no sabe muy bien cómo funciona un radar, las diferencias entre “detección”, “identificación” y “blocado” y, sobretodo, no conoce la “discriminación de retornos mínimos” imprescindible para que cualquier radar de detección cumpla su función.
¿COMO FILTRA UN RADAR LOS ECOS?
Una antena de radar de búsqueda emite una onda electromagnética hacia el cielo circundante en modo de barrido y analiza las señales que regresan al emisor para hacerse una idea de lo que le rodea.
Lo primero que hace al analizar los retornos recibidos es descartar los ecos demasiado pequeños porque no puede estar pendiente simultáneamente de 200 000 “abejas”. No me refiero a ese insecto en particular sino a cualquier retorno similar al de una abeja …y eso incluiría a nuestro caza furtivo que aún se encuentra bastante lejos del emisor.
Y al descartar dichos ecos de manera automática, no es posible comprobar su velocidad para decidir que no debimos descartar el retorno de esa “abeja”.
Por lo tanto, eso ya descarta la teoría defendida por algunos de la “abeja supersónica”.
LA IMPORTANCIA DEL “CLUTTER”
¿Pero por qué hay que descartar los retornos minimos?
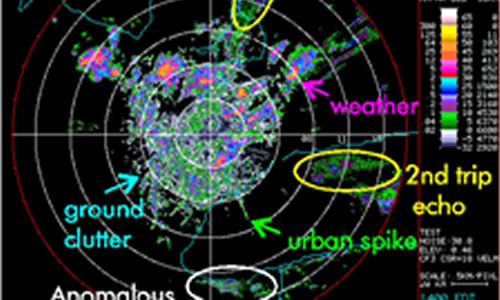
Por el llamado “clutter”: cuando una señal emitida por el radar alcanza determinados objetos, no se limita a “rebotar hacia el emisor”, sino que puede reflejarse en ángulo o dispersarse generando retornos secundarios desde varios puntos, pero que aún pueden ser suficientemente intensos como para ser detectados por separado. Entonces, si la emisión es potente, recibiremos también el clutter generado por ejemplo por aves o insectos, por el terreno, por árboles y edificios, por el oleaje en los radares de búsqueda marítima, por la lluvia, por las nubes convectivas como las de tormenta, por dispositivos destinados a generar ecos falsos (como láminas o virutas de algún material reflector o chaff) o por interferencias electrónicas.
Todo ello contribuye a que se detecten tantos retornos menores que resulte imposible distinguir el origen de cada uno de ellos. La mayoría son instantáneos y no están presentes en el siguiente “scan” del radar, por lo que no es posible “seguirlos” de manera individual y ya no sabes si un retorno del siguiente scan corresponde al del primero o si tiene otro origen diferente. Por eso todos los retornos por debajo de cierta intensidad son, automáticamente, descartados antes de intentar procesar el resto por el sistema. Es la única manera de que al operador de radar le aparezca en su pantalla una imagen limpia y comprensible del entorno circundante y no una nube enorme de retornos.
Y todo esto es en la primera fase del proceso: la detección. Pero una “detección” no es útil sin una “identificación” del retorno recibido. Eso implica esperar a que ese retorno significativo sea mayor para poder establecer su velocidad, altura y rumbo en la fase de seguimiento. Una vez identificado y situado el retorno, se pasa a un radar de control de tiro para poder “blocarlo” y así convertirlo en un verdadero objetivo abatible ya sea mediante misiles o cañones.
Todo ese proceso entre la primera detección y el fijado final requiere un tiempo en el que el avión furtivo podrá lanzar sus misiles o cambiar de ruta con bastante impunidad …pues durante ese tiempo, el sistema de defensa aún no sabe que es ese retorno pequeño que logró superar el umbral de “discriminación de retornos mínimos”.
Quizás, para entonces, ya sea demasiado tarde para el sistema de defensa.
¿Y SI AÑADIMOS APOYO ECM?
El planteamiento anterior es el de un avión realmente furtivo volando en solitario hacia un emisor terrestre o aéreo.
Pero en la doctrina de la USAF actual será raro que un avión como un B-21, F-22 o F-35 vuelen solos. Normalmente lo hacen bajo la cobertura de aviones de apoyo electrónico en un espacio previamente analizado por sistemas de adquisición de información electrónica ELINT.
Los aviones de guerra electrónica como el EA-18 transportan “jammers” destinados a crear retornos “prefabricados” para confundir los sistemas de defensa antiaérea. Pueden llenar el retorno con una señal tan grande que lo sature (el operador detecta que hay algo ahí pero no puede apuntar, es como si miras a alguien que sostiene una linterna potente apuntándote a los ojos: estás ciego). También pueden crear multitud de retornos menores o retornos concretos que parezcan estar donde no están. El radar AESA del F-35 es capaz de generar también retornos falsos sin que sea un verdadero “jammer”.
Todo está enfocado para que el retorno del avión furtivo atacante que logre ser inicialmente detectado (que no identificado) por el sistema emisor, sea tan “poco importante” en un entorno sobrecargado de señales más potentes, que, simplemente, sea descartado primero por el sistema automático anti-clutter o, si lo logra superar, por el operador del sistema terrestre o aéreo.





